

Home > 会長からのメッセージ目次 > メッセージNo.107
| ←No.106へ | No.108へ→ |
メッセージNo.107 アクティブ・タッチ
「アクティブ・タッチ(能動的触覚,active
touch)」は認知神経リハビリテーションの訓練において重要な神経メカニズムである。また、トレードオフ問題で論じた外部世界(物体)の知覚と内部世界(身体)の知覚のバランス比率にも深く関係している。
ギブソンは「運動するには知覚しなければならないが、知覚するには運動しなければならない」とした上で、触知覚には「パッシィブ・タッチ(受動的触覚)」と「アクティブ・タッチ(能動的触覚)」がある。「パッシィブ・タッチ」は外部刺激によるもので身体接触感として受容する。一般的な表在感覚の検査は受動的触覚の検査である。一方、「アクティブ・タッチ(能動的触覚)」は物体接触感として受容する。触覚や圧覚だけでなく関節の運動覚や筋収縮によるプロプリオセブション(固有感覚)も発生する。
「パッシィブ・タッチ」では第一次体性感覚野が活性化するが、「アクティブ・タッチ」では2倍の活性化が認められるだけでなく、大脳皮質の頭頂葉連合野、前頭葉の運動関連領域、大脳基底核、小脳なども活性化する。それは随意運動(筋収縮)だけでなく、知覚の予測メカニズムや運動イメージの想起も参加してくるからである。また、アクティブ・タッチを認知問題(問い)にすると体性感覚の「何の空間(what
system)」や「どこの空間(where system)」など、脳全体の神経メカニズムが活動する巻き込まれて活動する。

図1 手指のアクティブ・タッチの訓練
(手指で立方体を知覚する訓練)
片麻痺の軽度な運動麻痺には「アクティブ・タッチ」の訓練が有効である。たとえば、複数の小さな物体(正方形、長方形、錐体形、円柱形、球などの立方体)を2個ずつ用意し、その内の一つを「シーツの下」に入れ、閉眼でのアクティブ・タッチで識別させて、どの立方体であったかを開眼して視覚的に確認する訓練がある(図1)。
ただし、この立方体の識別に触覚は必要ない。手指の運動覚での「形」の識別を求めている。アクティブ・タッチなので触覚、圧覚、運動覚、固有感覚が入力されているが、その体性感覚の中から手指の運動覚に選択的な注意を向け、それを立方体の形の特徴として知覚しなければならない。したがって、アクティブ・タッチにおける意識の志向性は外部世界(物体)に向ける必要がある。
また、この訓練(認知問題)は手指に「立体覚」を求めている。手の深部感覚(運動覚)の検査で鈍麻の場合、この立体覚が障害されていることが多い。セラピストは患者の深部感覚と手指の分離運動の可能性を考慮して、物体の物理的な差異を知覚的な差異として構築できるような訓練の難易度を設定しなければならない。認知神経リハビリテーションの訓練の組織化としては次のようになる。
[手指で立方体を識別する訓練]
・身体部位・・・・・・手指(グローバル)
・病理と訓練段階・・・原始的運動スキーマ(第3段階の自動運動)
・感覚モダリティ・・・運動覚(立体覚)
・認知問題・・・・・・空間問題(形)
ここで強調しておきたいのは、こうしたアクティブ・タッチの訓練のデリケート(繊細)さである。たとえば、立位における股関節部での「クッション(圧)」の硬さや柔らかさを識別する訓練を考えてみよう(図2)。
この訓練は片麻痺にも整形外科的疾患にも適応できるが、認知神経リハビリテーションの訓練の組織化としては次のようになる。
[骨盤でクッションを識別する訓練]
・身体部位・・・・・・股関節(骨盤と大腿骨、セグメンタル)
・病理と訓練段階・・・放散反応と原始的運動スキーマ(第3段階の自動運動)
・感覚モダリティ・・・圧覚
・認知問題・・・・・・接触問題(硬さ)

図2 股関節部のアクティブ・タッチの訓練
(骨盤でクッションを知覚する訓練)
この訓練を背臥位で行うと股関節部でのパッシィブ・タッチによるクッションの圧(5つの硬さの異なるスポンジ)の識別を求めることになるが、そうした背臥位での第1段階の訓練はあまり意味がない。なぜなら、股関節部(大腿側上部)の圧覚は行為に必要ないからである。もし、行うとすれば、股関節部への注意の喚起のためである。股関節の背臥位の訓練では空間問題がより重要で優先する。
この訓練は平行棒内立位(片手の平行棒へのライトタッチ)で行うことが圧倒的に多い。そして、訓練段階は「第2段階の自動介助運動」と「第3段階の自動運動」の両方ができる。
まず、「第2段階の自動介助運動」で行う場合、患者は直立立位を保持する。両足底を床に全面接地し、体重負荷は左右均等で、重心は正中に落としておく。そして、患者が直立立位を保持させた状態で、セラピストが一側の股関節部にクッションを接触させ、内側に向かってゆっくりと押す。この時、患者は股関節の空間的な位置を動かしてクッションを押し返すのではなく、直立立位の重心動揺が生じないように直立性を維持する。患者の下肢の筋群は抗重力活動を保持しており、外部からのクッションの圧はセラピストが加えている。その直立立位を維持した状態で患者はクッションの圧を識別しなければならない。あるいは、セラピスト両側にクッションを接触させて左右の差異の識別を求める。
したがって、この第2段階の訓練は完全なアクティブ・タッチではない。パッシィブ・タッチとアクティブ・タッチの中間である。この直立立位で前額面の左右方向から加わる圧の識別は、下肢の筋収縮がその圧をキャッチするためでなく、直立立位を維持するために活動している点でデリケートな知覚である。この知覚が困難なら、股関節部へのクッションの押しが足関節の下腿三頭筋や前脛骨筋の放散反応を誘発してしまい、直立立位が動揺して、足内反が出現するだろう。そのため、患者は両足底の全面接地の知覚を消してはならない。その辺りがトレードオフ問題で指摘した外部世界(物体)の知覚と内部世界(身体)の知覚のバランス比率に関わってくる。つまり、クッションの硬さや柔らかさは物体の知覚だが、両足底の全面接地は足底の機能面(functional
surface、岩村)の知覚は身体の知覚に相当する。
次に、「第3段階の自動運動」の訓練を説明する。この場合はアクティブ・タッチであり、セラピストはクッションを動かさず、患者が直立立位を保持した状態から前額面で骨盤を側方移動して硬さを識別する。
この時の骨盤の側方移動は「2.5cm」程度と僅かである。しかし、この自動運動によって正中の重心線も側方移動する。一側に体重負荷し、その一側の足底の支持基底面に重心が移動する。この運動は歩行の立脚中期での一側の体重支持期と同様の状態である(図3)。
片麻痺の場合、この骨盤の側方移動が過度に起こり、トレンデレンブルグ現象が出現しやすい。体重負荷に伴って骨盤を水平保持する中殿筋の活動不全は必発である。つまり、一側に体重負荷した状態で下肢の筋は抗重力活動を量的に増大しているのだが、それは分離して中殿筋は骨盤の水平保持をしなければならない。この中殿筋の活動は巧緻運動であって難易度は高い。そのため片麻痺歩行の立脚中期は不安定なのである。
その回復のために、この第3段階のアクティブ・タッチの訓練を試みる。2.5cm程度の僅かな骨盤の側方移動の間に、中殿筋の筋収縮を介したクッションの圧の識別を求めるのである。そのため、この訓練は非常にゆっくりと骨盤を側方移動させる。患者が速く動かしたり、セラピストがクッションを押し返したりすると識別は難しい。患者の知覚状況に応じて、セラピストがクッションを押し返す場合もあるが、その時は手を広げて面で押し、可能な限り一定の力で押すようにする。これは両側の左右にクッションを当てる場合も同様である。
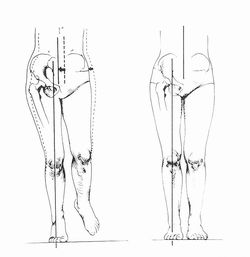
図3 歩行の立脚中期における骨盤の側方移動
(体重支持側へ重心が2.5cm移動する)
また、この第3段階の訓練でもトレードオフ問題で指摘した外部世界(物体)の知覚と内部世界(身体)の知覚のバランス比率に関わってくる。つまり、クッションの硬さや柔らかさは物体の知覚だが、一側の足底の支持基底面(足底の機能面)内への重心移動(functional
surface、岩村)の知覚は身体の知覚に相当する。患者の注意は同時注意でなければならないし、体重負荷の量的な変化や足底圧の変化も潜在的に知覚していなければならない。それらが知覚できなければ下肢の原始的運動スキーマがすぐに出現してしまうであろう。これらの意味で第2段階の訓練よりも第3段階の訓練は難易度が高く、患者にとってもセラピストにとってもデリケートな訓練となる。しかし、この第3段階のアクティブ・タッチクリアーしなければ片麻痺歩行の立脚中期は改善しない。
さらに、この立位における股関節での骨盤の側方移動は「行為間比較」にも応用できるだろう。たとえば、台所で立って料理している時を思い出してみよう。その行為の記憶の中に、両足で立っていて、左右のどちらか一側に手を伸ばして食器を取ったことは誰でもあるだろう。この時、自然に前額面での重心移動が生じ、無意識的に一側の下肢で体重負荷しているはずだ。その過去の行為を想起してみよう。すると、その台所での行為と第3段階の訓練が骨盤の側方移動、前額面での体重移動、両足底の圧では類似しているが、行為の意図や感情という点では差異があることに気づくだろう。今度は実際に直立立位から一側に手を伸ばして何かを取ってみよう。それは現在の行為である。こうして行為の記憶、訓練、現実の行為を比較することができる。
こんな風に行為の類似と差異を発見し、比較してゆく。歩行の回復のためには骨盤の巧緻運動を学習してゆくことが重要となる。人間の場合、股関節や骨盤の運動はかなり複雑である。そのために錐体路支配も強い。股関節や骨盤には小さな回旋筋も多い。その知覚運動リンケージはデリケートである。
また、歩行時に骨盤は水平保持したまま前方回旋(8度)する。それが歩行の立脚中期である。だとすれば、セラピストは次に骨盤の前方移動のためのアクティブ・タッチの訓練も考えなければならない。訓練はセラピストの想像力が生み出すものだ。
手のアクティブ・タッチの訓練は一般化しているはずだ。手をROMと筋力訓練で治療するセラピストは直ぐにアクティブ・タッチの訓練に変更すべきだ。一方、歩行の回復には足底のアクティブ・タッチの訓練が必要だ。そして、さらに股関節や骨盤のアクティブ・タッチの訓練も可能である。だが、股関節や骨盤は物体と接触することが少なく、誰もアクティブ・タッチの訓練が必要だと考えていない。アクティブ・タッチの訓練は体幹でもきわめて重要である。だから、もっとアクティブ・タッチの訓練を身体各部に拡張してほしい。
アクティブ・タッチの訓練は手だけでなく、足底にも試みるべきだ。
さらに、股関節での骨盤の側方移動にも試みることができる。
なお、認知神経リハビリテーションにおいてはパッシィブ・タッチの訓練からアクティブ・タッチの訓練へと進めるのが基本である。そして、アクティブ・タッチの訓練は第2段階の一部の訓練と第3段階の訓練で試みる。また、パッシィブ・タッチの訓練であっても、アクティブ・タッチの訓練であっても、身体と物体(道具)を接触させる場合は、外部世界(物体)の知覚に注意を向けるのが基本である。
したがって、トレードオフ問題と呼んで論議している外部世界(物体)の知覚と内部世界(身体)の知覚のバランス比率については、患者に物体の接触性(表面性状、硬さ、重量、摩擦)と空間性(方向、距離、形)の知覚を求めるのが原則となる。純粋な空間問題は空中で上下肢を移動する場合だけである。何かに手足が接触したら、その物体が「どこの空間」に存在するかと問うべきである。
メルロ=ポンティは「身体図式(body
schema)」について、「盲人は、対象の位置を杖の長さによって知るというよりむしろ、逆に、杖の長さを対象の位置によって知る」と述べている。
人間の知覚は内部世界(身体)を知覚して外部世界(物体)を知覚するのでなく、外部世界(物体)を知覚して内部世界(身体)を知覚するのである。それが身体と環境の相互作用における「自己組織化(学習による脳の可塑性を介した身体図式の形成)」の原理なのである。
しかし、まだ「知覚する行為」における意識の志向性、バインディング、トレードオフなどの謎は残るように思われる。
運動機能の回復に必要なのは「パッシィブ・タッチ」と「アクティブ・タッチ」である。特に、アクティブ・タッチは知覚運動システムの学習に有効であり、異常な病的要素(伸張反射、放散反応、原始的運動スキーマ、運動単位の動員異常、関節拘縮、防御性筋収縮、筋力低下、疼痛など)を制御しながらのアクティブ・タッチの多様性の学習が「行為の創発」の前提条件になる。また、アクティブ・タッチの知覚は行為間比較に応用できる。
アクティブ・タッチは認知神経リハビリテーションのみならず、すべてのリハビリテーション治療の基本手技とすべきである。そのためにはセラピストが日々の臨床での訓練をアクティブ・タッチの訓練に変更する必要がある。
| ←No.106へ | No.108へ→ |